Skip to content
Home
0. CV
1. Personal
2. University
3. Challenges
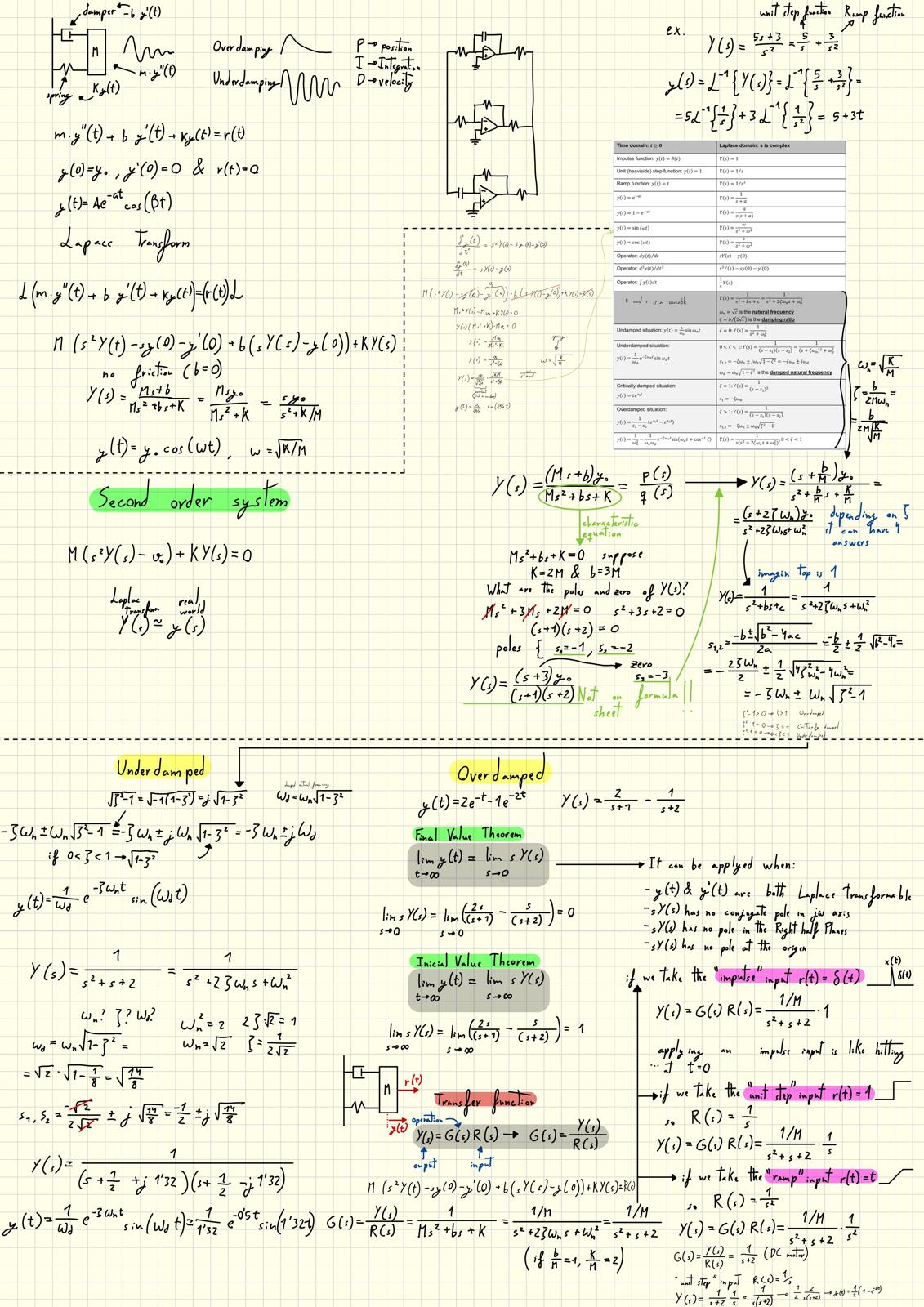
2.2.2. Control Systems Theory